 |
| March 08, 2016 | Volume 12 Issue 10 |
Motion Control News & Products

Designfax weekly eMagazine

Archives
Partners
Manufacturing Center
Product Spotlight
Modern Applications News
Metalworking Ideas For
Today's Job Shops
Tooling and Production
Strategies for large
metalworking plants
Overhung load adaptors provide load support and contamination protection
 Overhung load adaptors (OHLA) provide both overhung radial and axial load support to protect electrified mobile equipment motors from heavy application loads, extending the lifetime of the motor and alleviating the cost of downtime both from maintenance costs and loss of production. They seal out dirt, grime, and other contaminants too. Zero-Max OHLAs are available in an extensive offering of standard models (including Extra-Duty options) for typical applications or customized designs.
Overhung load adaptors (OHLA) provide both overhung radial and axial load support to protect electrified mobile equipment motors from heavy application loads, extending the lifetime of the motor and alleviating the cost of downtime both from maintenance costs and loss of production. They seal out dirt, grime, and other contaminants too. Zero-Max OHLAs are available in an extensive offering of standard models (including Extra-Duty options) for typical applications or customized designs.
Learn more.
Why choose electric for linear actuators?
 Tolomatic has been delivering a new type of linear motion technology that is giving hydraulics a run for its money. Learn the benefits of electric linear motion systems, the iceberg principle showing total cost of ownership, critical parameters of sizing, and conversion tips.
Tolomatic has been delivering a new type of linear motion technology that is giving hydraulics a run for its money. Learn the benefits of electric linear motion systems, the iceberg principle showing total cost of ownership, critical parameters of sizing, and conversion tips.
Get this informative e-book. (No registration required)
New AC hypoid inverter-duty gearmotors
 Bodine Electric Company introduces 12 new AC inverter-duty hypoid hollow shaft gearmotors. These type 42R-25H2 and 42R-30H3 drives combine an all-new AC inverter-duty, 230/460-VAC motor with two hypoid gearheads. When used with an AC inverter (VFD) control, these units deliver maintenance-free and reliable high-torque output. They are ideal for conveyors, gates, packaging, and other industrial automation equipment that demands both high torque and low power consumption from the driving gearmotor.
Bodine Electric Company introduces 12 new AC inverter-duty hypoid hollow shaft gearmotors. These type 42R-25H2 and 42R-30H3 drives combine an all-new AC inverter-duty, 230/460-VAC motor with two hypoid gearheads. When used with an AC inverter (VFD) control, these units deliver maintenance-free and reliable high-torque output. They are ideal for conveyors, gates, packaging, and other industrial automation equipment that demands both high torque and low power consumption from the driving gearmotor.
Learn more.
Next-gen warehouse automation: Siemens, Universal Robots, and Zivid partner up
 Universal Robots, Siemens, and Zivid have created a new solution combining UR's cobot arms with Siemens' SIMATIC Robot Pick AI software and Zivid's 3D sensors to create a deep-learning picking solution for warehouse automation and intra-logistics fulfillment. It works regardless of object shape, size, opacity, or transparency and is a significant leap in solving the complex challenges faced by the logistics and e-commerce sectors.
Universal Robots, Siemens, and Zivid have created a new solution combining UR's cobot arms with Siemens' SIMATIC Robot Pick AI software and Zivid's 3D sensors to create a deep-learning picking solution for warehouse automation and intra-logistics fulfillment. It works regardless of object shape, size, opacity, or transparency and is a significant leap in solving the complex challenges faced by the logistics and e-commerce sectors.
Read the full article.
Innovative DuoDrive gear and motor unit is UL/CSA certified
 The DuoDrive integrated gear unit and motor from NORD DRIVE-SYSTEMS is a compact, high-efficiency
solution engineered for users in the fields of intralogistics, pharmaceutical, and the food and beverage industries. This drive combines a IE5+ synchronous motor and single-stage helical gear unit into one compact housing with a smooth, easy-to-clean surface. It has a system efficiency up to 92% and is available in two case sizes with a power range of 0.5 to 4.0 hp.
The DuoDrive integrated gear unit and motor from NORD DRIVE-SYSTEMS is a compact, high-efficiency
solution engineered for users in the fields of intralogistics, pharmaceutical, and the food and beverage industries. This drive combines a IE5+ synchronous motor and single-stage helical gear unit into one compact housing with a smooth, easy-to-clean surface. It has a system efficiency up to 92% and is available in two case sizes with a power range of 0.5 to 4.0 hp.
Learn more.
BLDC flat motor with high output torque and speed reduction
 Portescap's 60ECF brushless DC slotted flat motor is the newest frame size to join its flat motor portfolio. This 60-mm BLDC motor features a 38.2-mm body length and an outer-rotor slotted configuration with an open-body design, allowing it to deliver improved heat management in a compact package. Combined with Portescap gearheads, it delivers extremely high output torque and speed reduction. Available in both sensored and sensorless options. A great choice for applications such as electric grippers and exoskeletons, eVTOLs, and surgical robots.
Portescap's 60ECF brushless DC slotted flat motor is the newest frame size to join its flat motor portfolio. This 60-mm BLDC motor features a 38.2-mm body length and an outer-rotor slotted configuration with an open-body design, allowing it to deliver improved heat management in a compact package. Combined with Portescap gearheads, it delivers extremely high output torque and speed reduction. Available in both sensored and sensorless options. A great choice for applications such as electric grippers and exoskeletons, eVTOLs, and surgical robots.
Learn more and view all the specs.
Application story: Complete gearbox and coupling assembly for actuator system
 Learn how GAM engineers not only sized and selected the appropriate gear reducers and couplings required to drive two ball screws in unison using a single motor, but how they also designed the mounting adapters necessary to complete the system. One-stop shopping eliminated unnecessary components and resulted in a 15% reduction in system cost.
Learn how GAM engineers not only sized and selected the appropriate gear reducers and couplings required to drive two ball screws in unison using a single motor, but how they also designed the mounting adapters necessary to complete the system. One-stop shopping eliminated unnecessary components and resulted in a 15% reduction in system cost.
Read this informative GAM blog.
Next-gen motor for pump and fan applications
 The next evolution of the award-winning Aircore EC motor from Infinitum is a high-efficiency system designed to power commercial and industrial applications such as HVAC fans, pumps, and data centers with less energy consumption, reduced emissions, and reduced waste. It features an integrated variable frequency drive and delivers upward of 93% system efficiency, as well as class-leading power and torque density in a low-footprint package that is 20% lighter than the previous version. Four sizes available.
The next evolution of the award-winning Aircore EC motor from Infinitum is a high-efficiency system designed to power commercial and industrial applications such as HVAC fans, pumps, and data centers with less energy consumption, reduced emissions, and reduced waste. It features an integrated variable frequency drive and delivers upward of 93% system efficiency, as well as class-leading power and torque density in a low-footprint package that is 20% lighter than the previous version. Four sizes available.
Learn more.
Telescoping linear actuators for space-constrained applications
 Rollon's new TLS telescoping linear actuators enable long stroke lengths with minimal closed lengths, which is especially good for applications with minimal vertical clearance. These actuators integrate seamlessly into multi-axis systems and are available in two- or three-stage versions. Equipped with a built-in automated lubrication system, the TLS Series features a synchronized drive system, requiring only a single motor to achieve motion. Four sizes (100, 230, 280, and 360) with up to 3,000-mm stroke length.
Rollon's new TLS telescoping linear actuators enable long stroke lengths with minimal closed lengths, which is especially good for applications with minimal vertical clearance. These actuators integrate seamlessly into multi-axis systems and are available in two- or three-stage versions. Equipped with a built-in automated lubrication system, the TLS Series features a synchronized drive system, requiring only a single motor to achieve motion. Four sizes (100, 230, 280, and 360) with up to 3,000-mm stroke length.
Learn more.
Competitively priced long-stroke parallel gripper
 The DHPL from Festo is a new generation of pneumatic long-stroke grippers that offers a host of advantages for high-load and high-torque applications. It is interchangeable with competitive long-stroke grippers and provides the added benefits of lighter weight, higher precision, and no maintenance. It is ideal for gripping larger items, including stacking boxes, gripping shaped parts, and keeping bags open. It has high repetition accuracy due to three rugged guide rods and a rack-and-pinion design.
The DHPL from Festo is a new generation of pneumatic long-stroke grippers that offers a host of advantages for high-load and high-torque applications. It is interchangeable with competitive long-stroke grippers and provides the added benefits of lighter weight, higher precision, and no maintenance. It is ideal for gripping larger items, including stacking boxes, gripping shaped parts, and keeping bags open. It has high repetition accuracy due to three rugged guide rods and a rack-and-pinion design.
Learn more.
Extend your range of motion: Controllers for mini motors
 FAULHABER has added another extremely compact Motion Controller without housing to its product range. The new MC3603 controller is ideal for integration in equipment manufacturing and medical tech applications. With 36 V and 3 A (peak current 9 A), it covers the power range up to 100 W and is suitable for DC motors with encoder, brushless drives, or linear motors.
FAULHABER has added another extremely compact Motion Controller without housing to its product range. The new MC3603 controller is ideal for integration in equipment manufacturing and medical tech applications. With 36 V and 3 A (peak current 9 A), it covers the power range up to 100 W and is suitable for DC motors with encoder, brushless drives, or linear motors.
Learn more.
When is a frameless brushless DC motor the right choice?
 Frameless BLDC motors fit easily into small, compact machines that require high precision, high torque, and high efficiency, such as robotic applications where a mix of low weight and inertia is critical. Learn from the experts at SDP/SI how these motors can replace heavier, less efficient hydraulic components by decreasing operating and maintenance costs. These motors are also more environmentally friendly than others.
Frameless BLDC motors fit easily into small, compact machines that require high precision, high torque, and high efficiency, such as robotic applications where a mix of low weight and inertia is critical. Learn from the experts at SDP/SI how these motors can replace heavier, less efficient hydraulic components by decreasing operating and maintenance costs. These motors are also more environmentally friendly than others.
View the video.
Tiny and smart: Step motor with closed-loop control
 Nanotec's new PD1-C step motor features an integrated controller and absolute encoder with closed-loop control. With a flange size of merely 28 mm (NEMA 11), this compact motor reaches a max holding torque of 18 Ncm and a peak current of 3 A. Three motor versions are available: IP20 protection, IP65 protection, and a motor with open housing that can be modified with custom connectors. Ideal for applications with space constraints, effectively reducing both wiring complexity and installation costs.
Nanotec's new PD1-C step motor features an integrated controller and absolute encoder with closed-loop control. With a flange size of merely 28 mm (NEMA 11), this compact motor reaches a max holding torque of 18 Ncm and a peak current of 3 A. Three motor versions are available: IP20 protection, IP65 protection, and a motor with open housing that can be modified with custom connectors. Ideal for applications with space constraints, effectively reducing both wiring complexity and installation costs.
Learn more.
Closed loop steppers drive new motion control applications
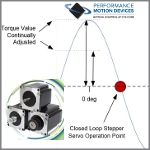 According to the motion experts at Performance Motion Devices, when it comes to step motors, the drive technique called closed loop stepper is making everything old new again and driving a burst of interest in the use of two-phase step motors. It's "winning back machine designers who may have relegated step motors to the category of low cost but low performance."
According to the motion experts at Performance Motion Devices, when it comes to step motors, the drive technique called closed loop stepper is making everything old new again and driving a burst of interest in the use of two-phase step motors. It's "winning back machine designers who may have relegated step motors to the category of low cost but low performance."
Read this informative Performance Motion Devices article.
Intelligent compact drives with extended fieldbus options
 The intelligent PD6 compact drives from Nanotec are now available with Profinet and EtherNet/IP. They combine motor, controller, and encoder in a space-saving package. With its 80-mm flange and a rated power of 942 W, the PD6-EB is the most powerful brushless DC motor of this product family. The stepper motor version has an 86-mm flange (NEMA 34) and a holding torque up to 10 Nm. Features include acceleration feed forward and jerk-limited ramps. Reduced installation time and wiring make the PD6 series a highly profitable choice for machine tools, packaging machines, or conveyor belts.
The intelligent PD6 compact drives from Nanotec are now available with Profinet and EtherNet/IP. They combine motor, controller, and encoder in a space-saving package. With its 80-mm flange and a rated power of 942 W, the PD6-EB is the most powerful brushless DC motor of this product family. The stepper motor version has an 86-mm flange (NEMA 34) and a holding torque up to 10 Nm. Features include acceleration feed forward and jerk-limited ramps. Reduced installation time and wiring make the PD6 series a highly profitable choice for machine tools, packaging machines, or conveyor belts.
Learn more.
In emergencies, should you trust a robot? Georgia Tech researchers say not really
In emergencies, people may trust robots too much for their own safety, a new study suggests. In a mock building fire, test subjects followed instructions from an "Emergency Guide Robot" even after the machine had proven itself unreliable -- and after some participants were told that the robot had broken down.
The research was designed to determine whether or not building occupants would trust a robot designed to help them evacuate a high-rise in case of fire or other emergency. But the researchers were surprised to find that the test subjects followed the robot's instructions -- even when the machine's behavior should not have inspired trust.
The research, believed to be the first to study human-robot trust in an emergency situation, is scheduled to be presented March 9 at the 2016 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2016) in Christchurch, New Zealand.

Georgia Tech researchers built the "Rescue Robot" to determine whether or not building occupants would trust a robot designed to help them evacuate a high-rise in case of fire or other emergency. [Credit: Rob Felt, Georgia Tech]
"People seem to believe that these robotic systems know more about the world than they really do, and that they would never make mistakes or have any kind of fault," said Alan Wagner, a senior research engineer in the Georgia Tech Research Institute (GTRI). "In our studies, test subjects followed the robot's directions even to the point where it might have put them in danger had this been a real emergency."
In the study, sponsored in part by the Air Force Office of Scientific Research (AFOSR), the researchers recruited a group of 42 volunteers, most of them college students, and asked them to follow a brightly colored robot that had the words "Emergency Guide Robot" on its side. The robot led the study subjects to a conference room, where they were asked to complete a survey about robots and read an unrelated magazine article. The subjects were not told the true nature of the research project.
In some cases, the robot -- which was controlled by a hidden researcher -- led the volunteers into the wrong room and traveled around in a circle twice before entering the conference room. For several test subjects, the robot stopped moving, and an experimenter told the subjects that the robot had broken down. Once the subjects were in the conference room with the door closed, the hallway through which the participants had entered the building was filled with artificial smoke, which set off a smoke alarm.
When the test subjects opened the conference room door, they saw the smoke -- and the robot, which was then brightly-lit with red LEDs and white "arms" that served as pointers. The robot directed the subjects to an exit in the back of the building instead of toward the doorway -- marked with exit signs -- that had been used to enter the building.
"We expected that if the robot had proven itself untrustworthy in guiding them to the conference room, that people wouldn't follow it during the simulated emergency," said Paul Robinette, a GTRI research engineer who conducted the study as part of his doctoral dissertation. "Instead, all of the volunteers followed the robot's instructions, no matter how well it had performed previously. We absolutely didn't expect this."
The researchers surmise that in the scenario they studied, the robot may have become an "authority figure" that the test subjects were more likely to trust in the time pressure of an emergency. In simulation-based research done without a realistic emergency scenario, test subjects did not trust a robot that had previously made mistakes.

A long camera exposure shows how the arms of the "Rescue Robot" give directions to building occupants in case of fire or other emergency. [Credit: Rob Felt, Georgia Tech]
"These are just the type of human-robot experiments that we as roboticists should be investigating," said Ayanna Howard, professor and Linda J. and Mark C. Smith Chair in the Georgia Tech School of Electrical and Computer Engineering. "We need to ensure that our robots, when placed in situations that evoke trust, are also designed to mitigate that trust when trust is detrimental to the human."
Only when the robot made obvious errors during the emergency part of the experiment did the participants question its directions. In those cases, some subjects still followed the robot's instructions even when it directed them toward a darkened room that was blocked by furniture.
In future research, the scientists hope to learn more about why the test subjects trusted the robot, whether that response differs by education level or demographics, and how the robots themselves might indicate the level of trust that should be given to them.
The research is part of a long-term study of how humans trust robots, an important issue as robots play a greater role in society. The researchers envision using groups of robots stationed in high-rise buildings to point occupants toward exits and urge them to evacuate during emergencies. Research has shown that people often don't leave buildings when fire alarms sound, and that they sometimes ignore nearby emergency exits in favor of more familiar building entrances.
But in light of these findings, the researchers are reconsidering the questions they should ask.
"We wanted to ask the question about whether people would be willing to trust these rescue robots," said Wagner. "A more important question now might be to ask how to prevent them from trusting these robots too much."
Beyond emergency situations, there are other issues of trust in human-robot relationships, said Robinette.
"Would people trust a hamburger-making robot to provide them with food?" he asked. "If a robot carried a sign saying it was a child-care robot,' would people leave their babies with it? Will people put their children into an autonomous vehicle and trust it to take them to grandma's house? We don't know why people trust or don't trust machines."
In addition to those already mentioned, the research included Wenchen Li and Robert Allen, graduate research assistants in Georgia Tech's College of Computing.
Support for this research was provided by the Linda J. and Mark C. Smith Chair in Bioengineering, and the Air Force Office of Scientific Research (AFOSR) under contract FA9550-13-1-0169. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the AFOSR.
CITATION: Paul Robinette, Wenchen Li, Robert Allen, Ayanna M. Howard, and Alan R. Wagner, "Overtrust of Robots in Emergency Evacuation Scenarios," (2016 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2016).
Source: Georgia Tech
Published March 2016
Rate this article
View our terms of use and privacy policy